
Oltre al sensore KY-032, che abbiamo visto in questo articolo, esiste un altro sensore IR utilizzato soprattutto sui robot didattici con c.d. la funzione di line tracking: il sensore TCRT5000 o KY-033. Questo sensore fa parte del KIT sensori costituito da 37 unità che potete acquistare a questo link, ed è costituito da un modulo con 3 pin per il collegamenti ed un potenziometro per regolarne la precisione.
Specifiche
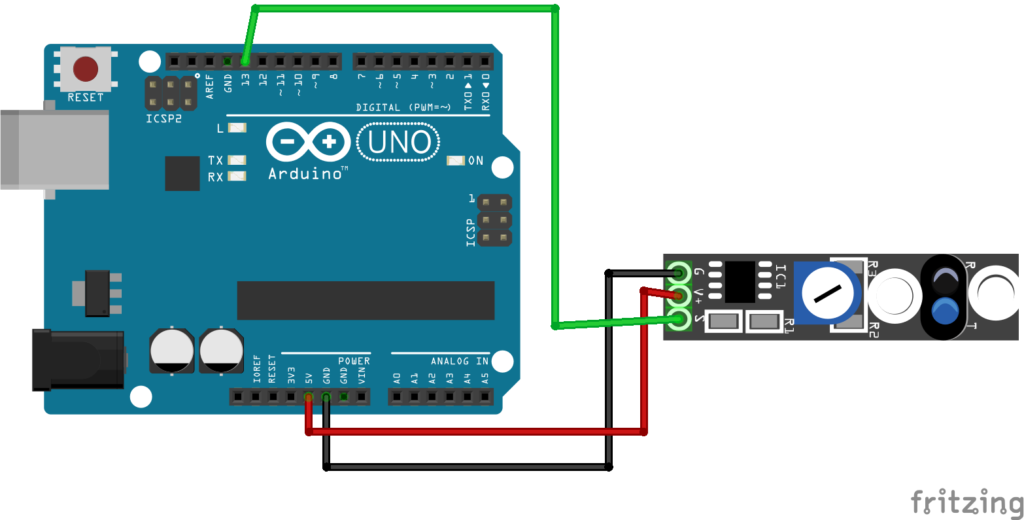
Il Sensore TCRT5000 è un modulo con output digitale costituito dall’omonimo sensore, un potenziometro, un comparatore LM393 e 3 pin per il collegamento, due di quali sono di alimentazione (Vcc e GND o V+ e G) ed uno sola di segnale (OUT o S).

Possiamo fornire corrente sia a 3,3V che a 5V, senza l’ausilio di alcuna resistenza, in quanto sono già presenti 3 resistenze, una delle quali è anche utilizzata dal potenziometro. Di queste resistenze, la R1 è invece adoperata dal LED di stato integrato nel modulo (in alcune versione è chiamata R3) che si accenderà quando il segnale viene ricevuto.

Per quanto riguarda il sensore vero e proprio, esso è costituito da una trasmittente (T) e da una ricevente (R) e, proprio come con il sensore KY-032, viene emesso un segnale IR che, una volta riflesso da una superficie, viene rilevato dalla ricevente e trasmesso sotto forma di segnale digitale (0 se il segnale viene ricevuto, 1 nel caso contrario).

Questo particolare sensore, però, non riesce a “vedere il colore nero”; spiegato in termini più tecnici, il segnale IR emesso non ritorna alla ricevente perchè assorbito dalle superfici nere. Per questa peculiarità, spesso vengono adoperati gruppi di questi sensori su auto smart per seguire le linee nere disegnate per terra e, da ciò, questo modulo prende il nome di Line Tracking Sensor.
Collegamento
Il collegamento del modulo TCRT5000 è semplicissimo: Vcc ai 5V, il GND a GND, OUT ad un qualsiasi pin digitale. Nel nostro esempio lo abbiamo collegato al pin digitale 13 di Arduino UNO.
Codice
Proprio come il collegamento, anche il codice per far funzionare il sensore KY-033 è estremamente semplice ed identico a quello usato per il KY-032. Nel VOID SETUP impostiamo la direzione del pin 13 come input, mentre avviamo il monitor seriale.
pinMod (13, INPUT);
Serial.begin (9600);
Serial.println("Avvio KY-033");
Nel VOID LOOP procediamo alla lettura dal sensore ed a stampare su monitor seriale ciò che rileviamo:
int sensore = digitalRead(13);
Serial.println (sensore);
Come detto prima, il sensore restituisce solo un valore tra o e 1, quindi adoperare una variabile intera è altamente indicato; se il sensore riceve il segnale darà valore 0, mentre se non viene rilevato nulla il valore sarà 1. Precisiamo che il raggio massimo di azione raggiungibile dal sensore non è superiore a 1,5cm. Aprendo il plotter seriale dalla IDE di Arduino ecco cosa notiamo ogni volta che viene rilevato un ostacolo.



